2.007 Rib-Collection Robot
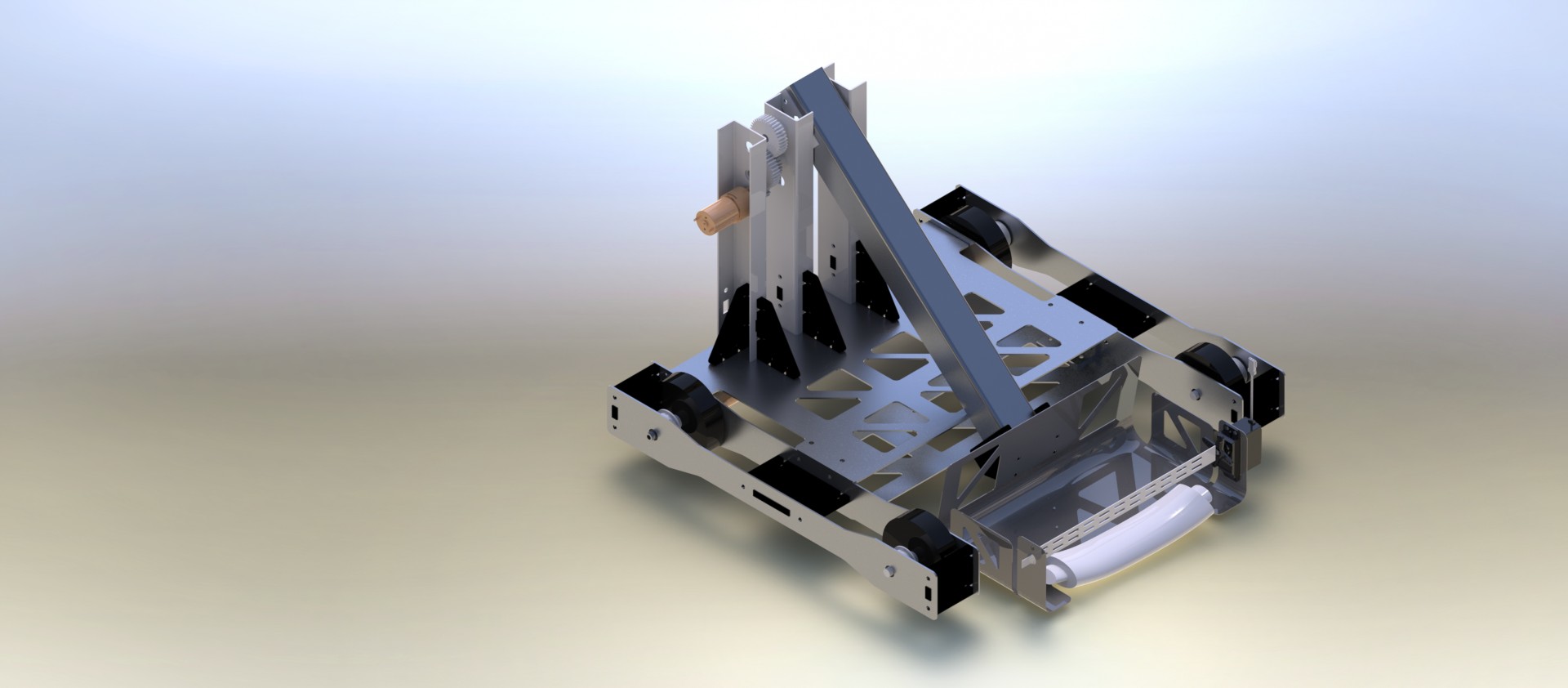
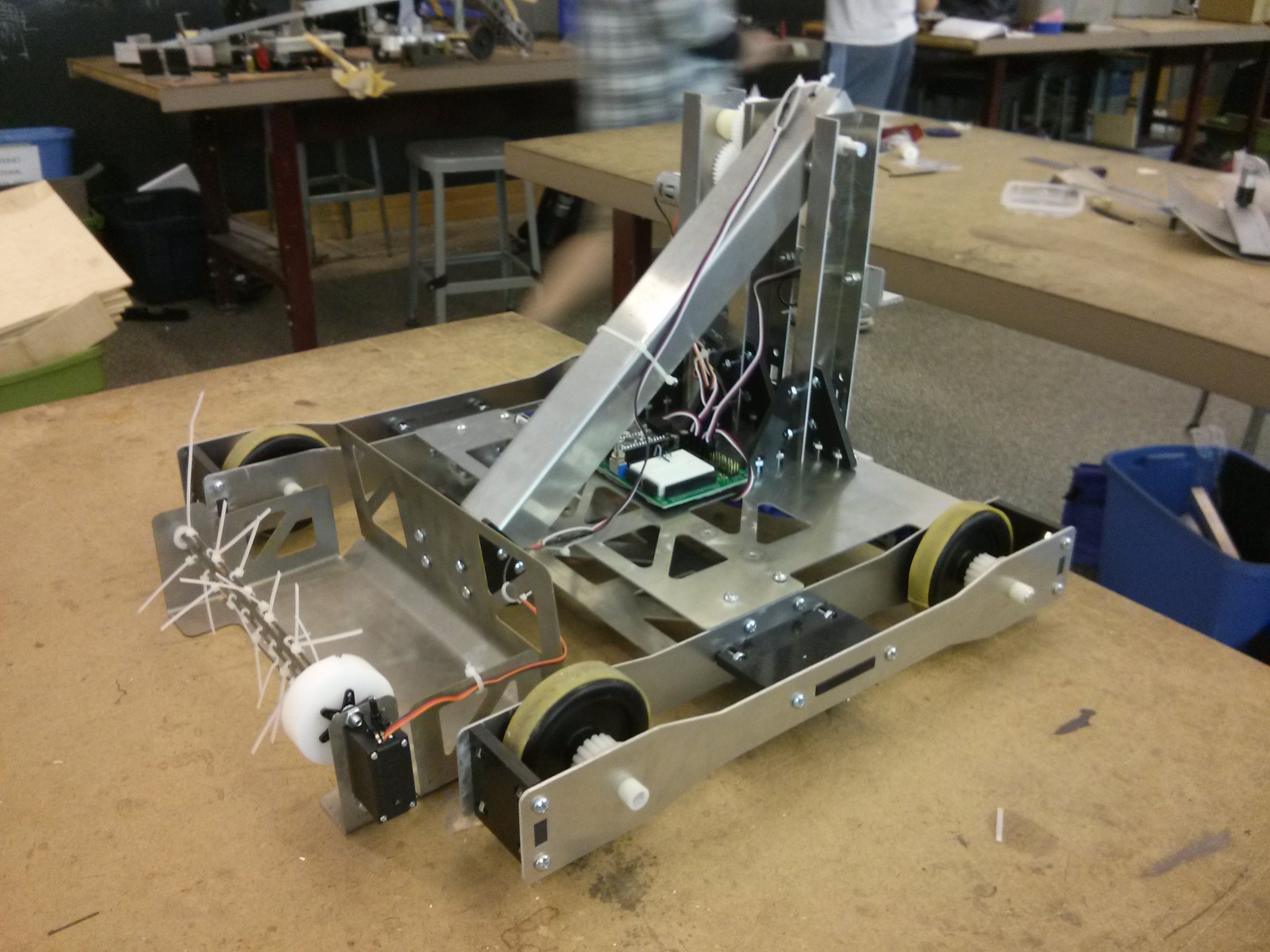
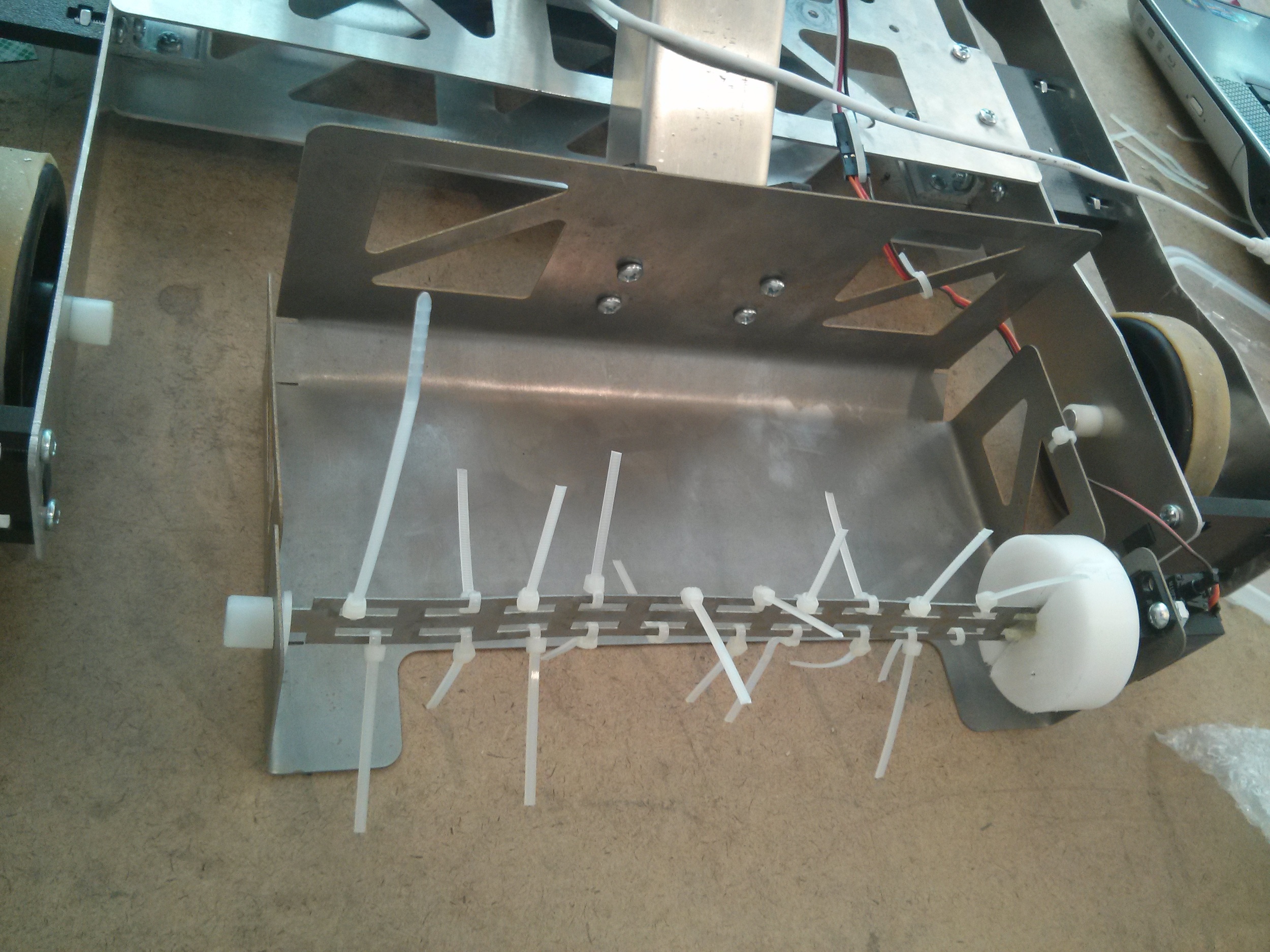
In 2.007 - Design and Manufacturing I class, the goal was to design, build, and test a robot for competition in a larger-than-life-sized Operation game. I analyzed the game to determine what I believed was the most effective strategy: picking up all three ribs and placing them on the second level of a small shelf. The vacuum-cleaner-inspired manipulation system utilized bristles in order to grab the ribs easily without precision control. Throughout the design process, the goal was to have a project that was not only reliable and competitive but also look clean and professional. Due to the constraints on material as well as the availability of manufacturing tools, emphasis was also placed on design for ease of manufacturing and assembly.